
Lqr算法
创始人
2025-05-28 15:25:22
横向动态模型
- 1.横向控制动态模型
- a.自行车动态模型
- b.线性自行车动态模型
- c.模型参数辨识
- 2.LQR-线性二次调节器
- a.什么是Lqr
- b.一维标量示例
- c.通解和Raccati方程
- d.LQR使用案例
- 3.车辆横向最优控制
- a.路径坐标模型
- b.使用Lqr进行轨迹跟踪
- c.带有Preview的轨迹跟踪
1.横向控制动态模型
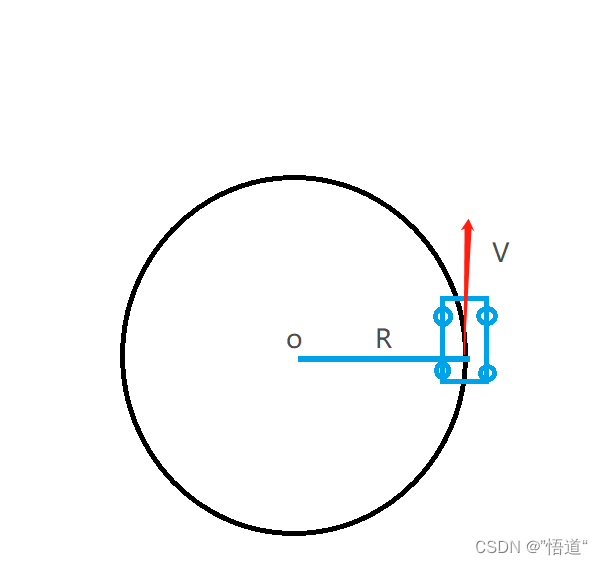
a.自行车动态模型
在车辆高速行驶的时候、每个车轮上的方向和车辆的方向一致的假设就不成立,即non-zero slip angle
汽车动力学模型:伸出右手-中指向上☞、食指向前,拇指向右;其中食指->Roll、拇指->pitch、中指->Yao.
b.线性自行车动态模型
自行车运动学模型:
自行车模型做出如下假设:
- 纵向速度恒定、左右车轮集中成一个车轮
- 忽略悬架运动、道路的倾斜、空气阻力影响,以便对汽车的纵向和横向的运动解耦分析;
待补充
c.模型参数辨识
2.LQR-线性二次调节器
a.什么是Lqr
b.一维标量示例
c.通解和Raccati方程
d.LQR使用案例
3.车辆横向最优控制
a.路径坐标模型
b.使用Lqr进行轨迹跟踪
c.带有Preview的轨迹跟踪
lqr的好处:若我们将系统设置为以误差为参考的系统,就可以直接套用lqr的结论得到一个相对优化的控制器。并且在实验的过程中如果,横向误差收敛的很慢,可以考虑提高;若前轮转角出现震荡,可以考虑降低;
lqr的缺点:
1、由于lqr是一个线性控制器,默认小 ,面对曲率过大的情况表现不佳;2、lqr只关注于当前点的情况,并没有考虑到未来路径的情况,即较短视;
lqr性能的提高
思路:用已知的路径做出预判,提前打方向盘,就可以提高性能
相关内容
热门资讯
第三方辅助挂!WPK线上辅助多...
第三方辅助挂!WPK线上辅助多久会检测到,(AAPoKer)透明挂黑科技,存在有挂(明通攻略)是一款...
第三方辅助挂!约局吧辅助多久会...
第三方辅助挂!约局吧辅助多久会检测到,(AAPoKer)透明挂黑科技,存在有挂(明通攻略)是一款可以...
第三方辅助挂!【AAPoKer...
第三方辅助挂!【AAPoKer】辅助多久会检测到,(AAPoKer)透明挂黑科技,存在有挂(明通攻略...
第三方辅助挂!得扑之星辅助多久...
1、超多福利:超高返利,海量正版游戏,得扑之星系统规律,上线得扑之星黑科技等满足你不同需求; 2、...
十分钟了解!微扑克系统是有问题...
十分钟了解!微扑克系统是有问题,鱼扑克app俱乐部,详细教程(有挂详情)-哔哩哔哩;超受欢迎的微扑克...